Traffic Flow-Based Crowdsourced Mapping in Complex Urban Scenario
Published in IEEE Robotics and Automation Letters (RA-L), 2023-07-03
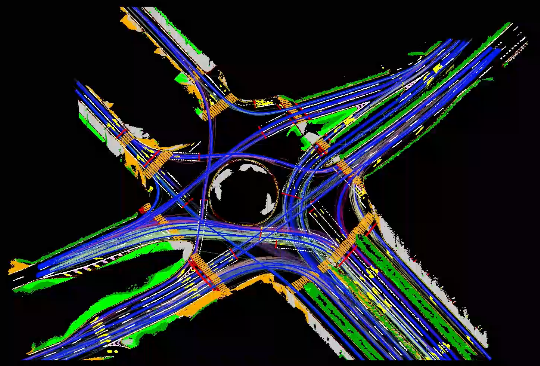 This paper proposes a traffic flow-optimized crowdsourced mapping framework for high-precision environmental modeling in complex urban scenarios.
This paper proposes a traffic flow-optimized crowdsourced mapping framework for high-precision environmental modeling in complex urban scenarios.
Tong Qin, Haihui Huang, Ziqiang Wang, Tongqing Chen, Wenchao Ding. (2023). "Traffic Flow-Based Crowdsourced Mapping in Complex Urban Scenario." IEEE Robotics and Automation Letters (RA-L).
Download Paper
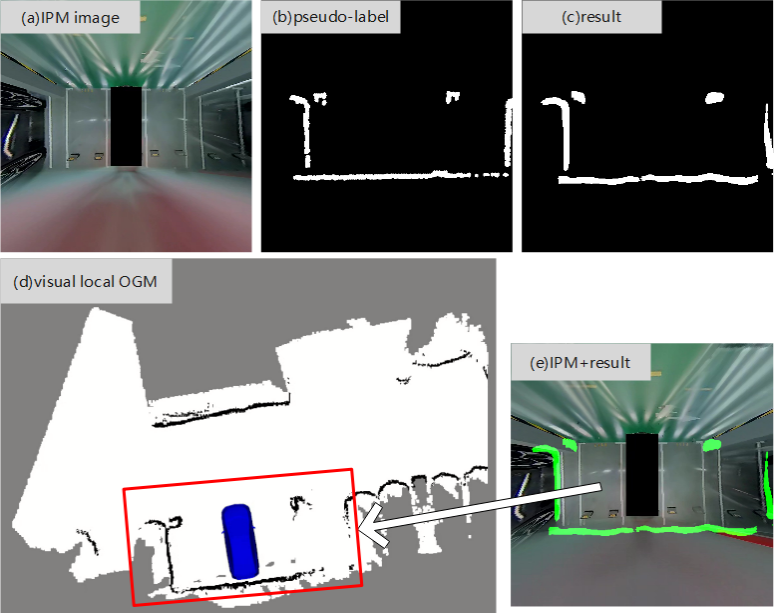 This paper develops an IPM-based neural occupancy grid map to address perspective distortion in visual parking mapping tasks.
This paper develops an IPM-based neural occupancy grid map to address perspective distortion in visual parking mapping tasks.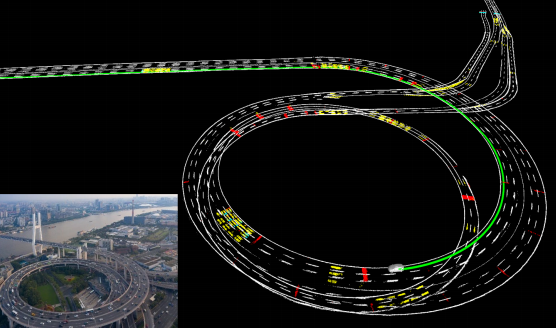 This paper proposes a compact semantic map representation to enable real-time visual localization for low-cost autonomous driving platforms.
This paper proposes a compact semantic map representation to enable real-time visual localization for low-cost autonomous driving platforms.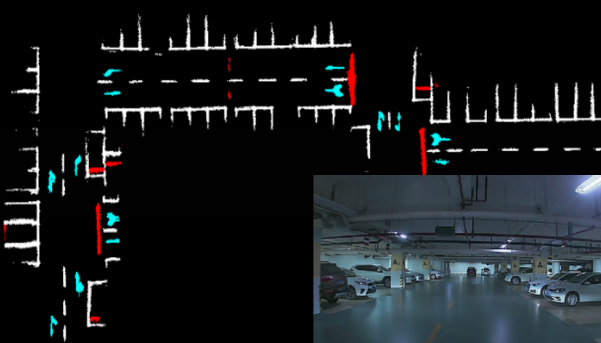 This paper introduces AVP-SLAM, a semantic visual mapping and localization system designed for autonomous parking scenarios.
This paper introduces AVP-SLAM, a semantic visual mapping and localization system designed for autonomous parking scenarios.