Portfolio item number 1
Short description of portfolio item number 1
Short description of portfolio item number 1
Short description of portfolio item number 2
Published in 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2020-10-24
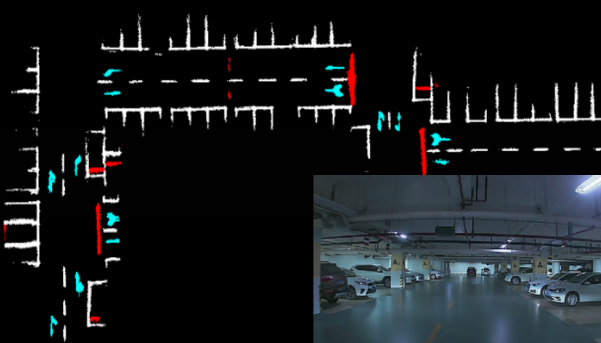 This paper introduces AVP-SLAM, a semantic visual mapping and localization system designed for autonomous parking scenarios.
This paper introduces AVP-SLAM, a semantic visual mapping and localization system designed for autonomous parking scenarios.
Tong Qin, Tongqing Chen, Yilun Chen, Qing Su. (2020). "AVP-SLAM: Semantic Visual Mapping and Localization for Autonomous Vehicles in the Parking Lot." 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS).
Download Paper
Published in 2021 IEEE International Conference on Robotics and Automation (ICRA), 2021-05-30
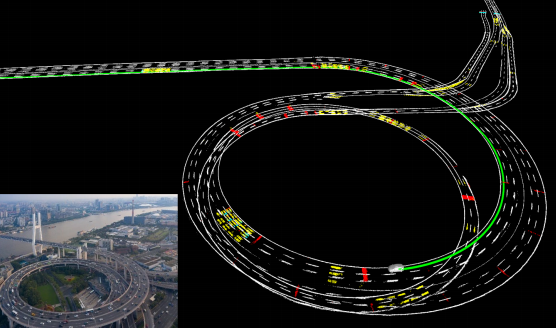 This paper proposes a compact semantic map representation to enable real-time visual localization for low-cost autonomous driving platforms.
This paper proposes a compact semantic map representation to enable real-time visual localization for low-cost autonomous driving platforms.
Tong Qin, Yuxin Zheng, Tongqing Chen, Yilun Chen, Qing Su. (2021). "A Light-Weight Semantic Map for Visual Localization towards Autonomous Driving." 2021 IEEE International Conference on Robotics and Automation (ICRA).
Download Paper
Published in 2023 IEEE International Conference on Robotics and Automation (ICRA), 2023-05-29
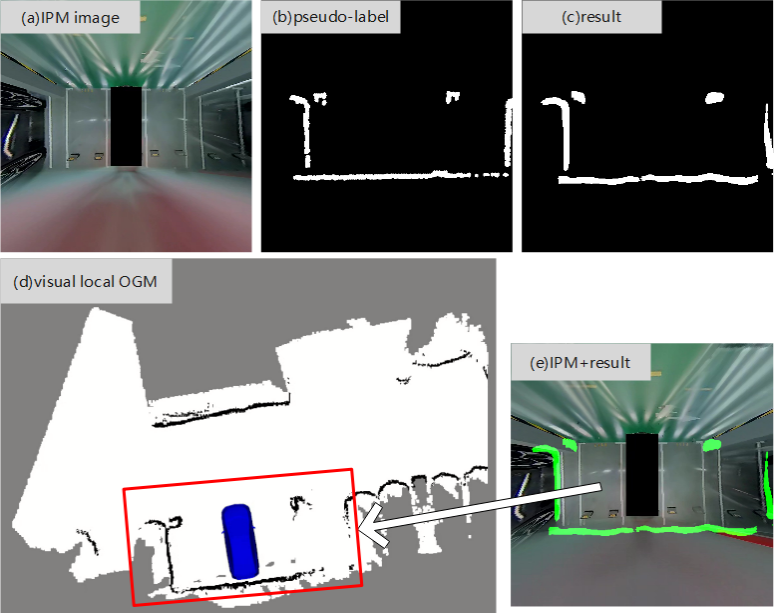 This paper develops an IPM-based neural occupancy grid map to address perspective distortion in visual parking mapping tasks.
This paper develops an IPM-based neural occupancy grid map to address perspective distortion in visual parking mapping tasks.
Xiangru Mu, Haoyang Ye, Daojun Zhu, Tongqing Chen, Tong Qin. (2023). "Inverse Perspective Mapping-Based Neural Occupancy Grid Map for Visual Parking." 2023 IEEE International Conference on Robotics and Automation (ICRA).
Download Paper
Published in IEEE Robotics and Automation Letters (RA-L), 2023-07-03
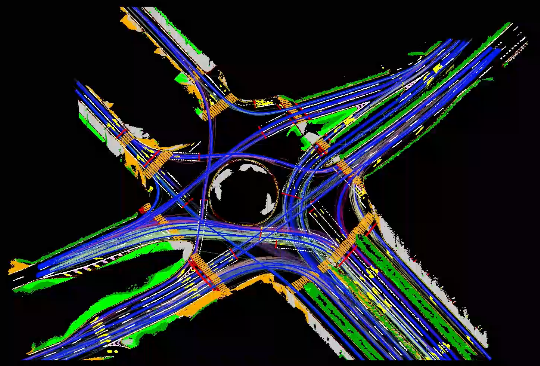 This paper proposes a traffic flow-optimized crowdsourced mapping framework for high-precision environmental modeling in complex urban scenarios.
This paper proposes a traffic flow-optimized crowdsourced mapping framework for high-precision environmental modeling in complex urban scenarios.
Tong Qin, Haihui Huang, Ziqiang Wang, Tongqing Chen, Wenchao Ding. (2023). "Traffic Flow-Based Crowdsourced Mapping in Complex Urban Scenario." IEEE Robotics and Automation Letters (RA-L).
Download Paper
Published:
This is a description of your talk, which is a markdown file that can be all markdown-ified like any other post. Yay markdown!
Published:
This is a description of your conference proceedings talk, note the different field in type. You can put anything in this field.
Undergraduate course, University 1, Department, 2014
This is a description of a teaching experience. You can use markdown like any other post.
Workshop, University 1, Department, 2015
This is a description of a teaching experience. You can use markdown like any other post.